 Facebook Messenger
Facebook Messenger 
產品型號
三菱電機 工業用機械手臂MELFA 垂直多關節型 RV-FR系列
| 型號 |
最大範圍半徑 (mm) |
負載能力 (Kg) |
動作自由度 | 環境規格 | 接續控制器 | |
| ►MELFA RV-2FR / RV-2FRL ( 垂直多關節型 ) | ||||||
 |
►RV-2FR(B) | 504 | 最大3(額定2)*1 | 6軸 | 標準 : IP30 | CR800-D |
|
►RV-2FRL(B) | 649 | 最大3(額定2)*1 | 6軸 | 標準 : IP30 | CR800-D |
| ►MELFA RV-4FR / RV-4FRL ( 垂直多關節型)(標準/油霧/潔淨規格) | ||||||
 |
►RV-4FR(M)(C) | 515 | 最大4(額定4)*1 | 6軸 | 標準 : IP30 油霧 : IP67 無塵 : ISO等級3 |
CR800-D |
|
►RV-4FRL(M)(C) | 649 | 最大4(額定)*1 | 6軸 | 標準 : IP30 油霧 : IP67 無塵 : ISO等級3 |
CR800-D |
| ►MELFA RV-7FR / RV-7FRL / RV-7FRLL ( 垂直多關節型 )(標準/油霧/潔淨等級) | ||||||
 |
►RV-7FR(M)(C) | 713 | 最大7(額定7)*1 | 6軸 | 標準 : IP30 油霧 : IP67 無塵 : ISO等級3 |
CR800-D |
|
►RV-7FRL(M)(C) | 908 | 最大7(額定7)*1 | 6軸 | 標準 : IP30 油霧 : IP67 無塵 : ISO等級3 |
CR800-D |
 |
►RV-7FRLL(M)(C) | 1503 | 最大7(額定7)*1 | 6軸 | 標準 : IP30 油霧 : IP67 無塵 : ISO等級3 |
CR800-D |
| ►MELFA RV13FR / RV-13FRL ( 垂直多關節型)(標準/油霧/潔淨規格) | ||||||
 |
►RV-13FR(M)(C) | 1094 | 最大13(額定12)*1 | 6軸 | 標準 : IP30 油霧 : IP67 無塵 : ISO等級3 |
CR800-D |
|
►RV-13FRL(M)(C) | 1388 | 最大13(額定13)*1 | 6軸 | 標準 : IP30 油霧 : IP67 無塵 : ISO等級3 |
CR800-D |
| ►MELFA RV-20FR ( 垂直多關節型)(標準/油霧/潔淨規格) | ||||||
 |
►RV-20FR(M)(C) | 1094 | 最大20(額定15)*1 | 6軸 | 標準 : IP30 油霧 : IP67 無塵 :ISO等級3 |
CR800-D |
*1 最大負載能力為機械接口面向下 ( 與垂直線成±10° ) 時的最大有效負載。
產品說明
三菱電機工業用機械手臂(ROBOT) FR系列垂直多關節型 特長
•具有最佳的手臂長度和更寬的6軸關節移動範圍,適用於複雜的組裝和加工動作。
•以輕巧的機身,順暢的手臂實現了大範圍的作業區域和高負載能力。
•從機器零件的運送到電子零件的裝配,適用各種現場佈置。
•藉由耐環境條件規格,安裝環境無限制,可適用於廣泛的應用。
♦RV-FR系列 產品一覽
.png)
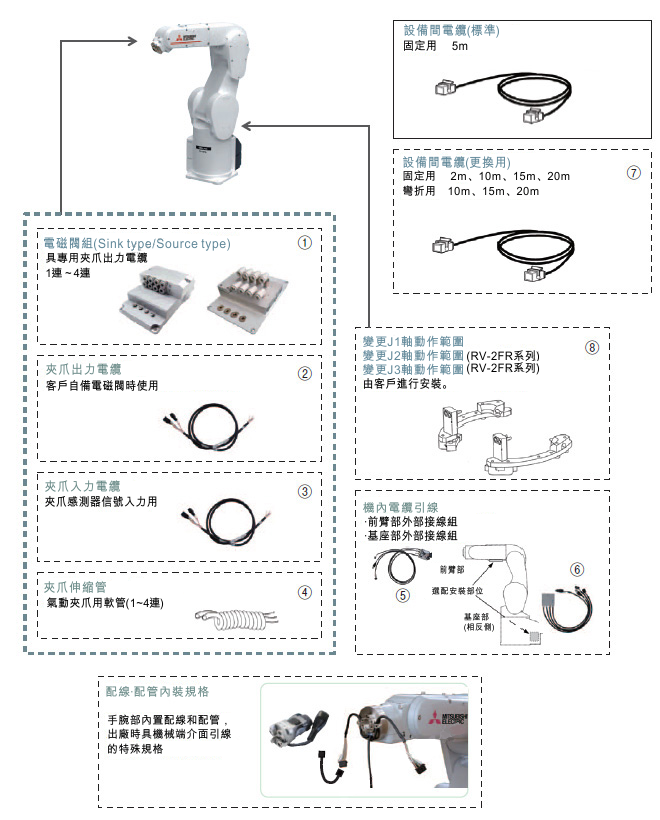
♦機械手臂本體選配構成
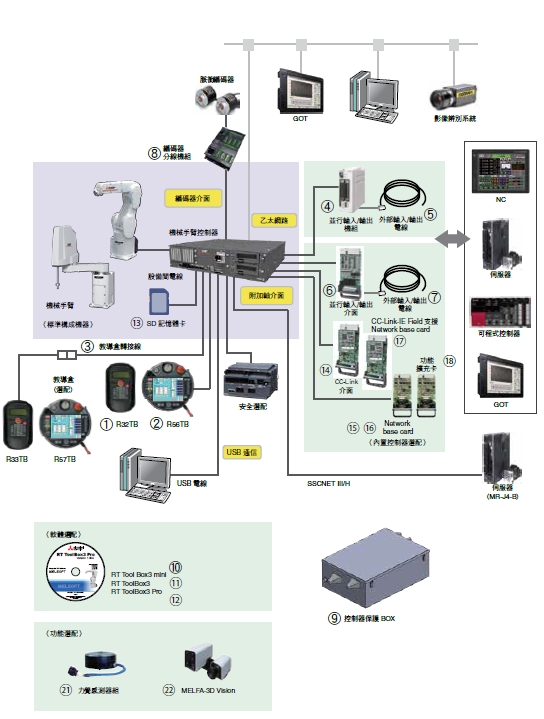
♦機械手臂控制器系統構成

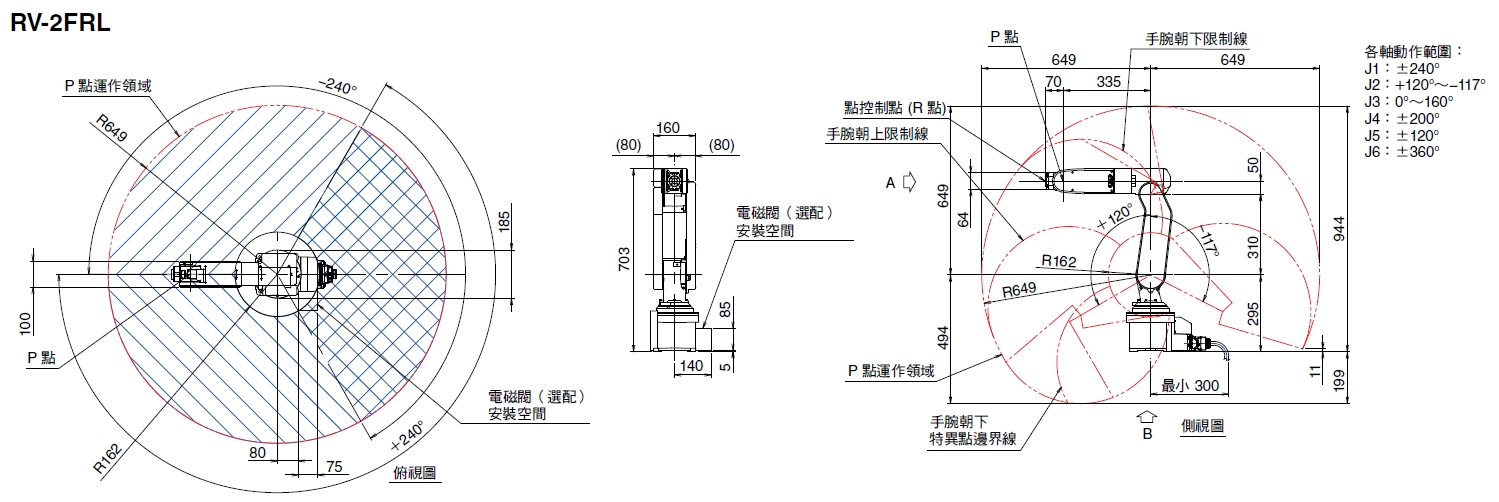
• 最大合成速度 : 5.0m/s ( RV-2FR )
• 回轉軸動作範圍 : ±240度
• 標準周期時間 : 0.6秒範圍 ( RV-2FR )
| 型號 | RV-2FR(B) | RV-2FRL(B) | ||
| 環境規格 | 標準 | |||
| 保護等級 | IP30 | |||
| 安裝姿勢 | 落地、懸吊(壁掛*2) | |||
| 構造 | 垂直多關節形 | |||
| 動作自由度 | 6軸 | |||
| 驅動方式 |
AC伺服馬達 ( J2、J3、J5軸 內置煞車)*1 |
|||
| 位置檢出方式 | 絕對位置編碼器 | |||
| 負載能力 | Kg | 最大2 ( 額定2 )*5 | ||
| 臂長 | mm | 230+270 | 310+335 | |
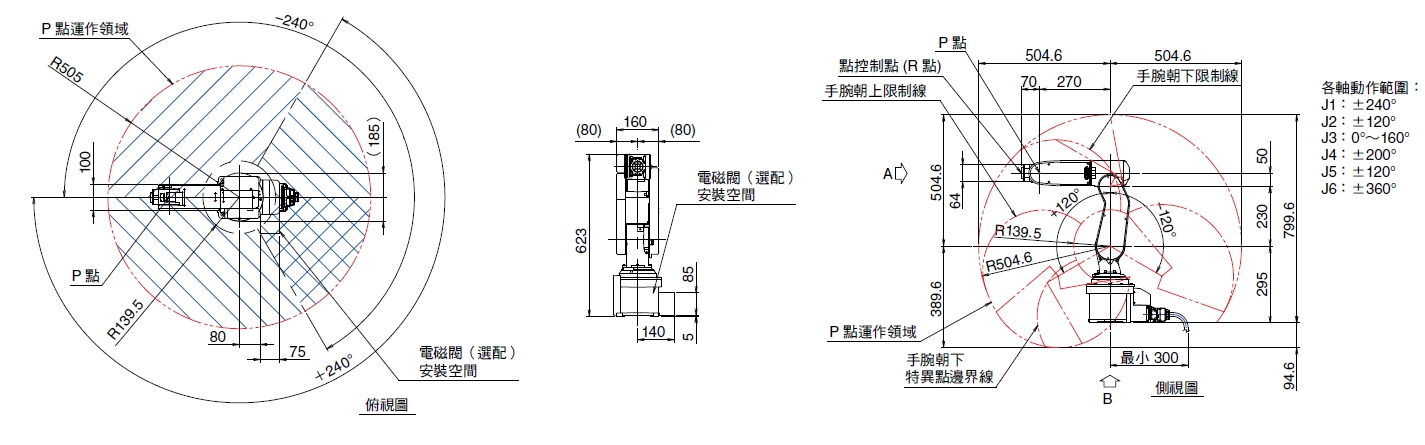
| 最大有效範圍半徑 | mm | 504 | 649 | |
| 動作範圍 | J1 | 度 | 480 ( - 240 ~ + 240 ) | |
| J2 | 度 | 240 ( - 120 ~ + 120 ) | 237 ( - 117 ~ + 120 ) | |
| J3 | 度 | 160 ( 0 ~ + 160 ) | ||
| J4 | 度 | 400 ( - 200 ~ + 200 ) | ||
| J5 | 度 | 240 ( - 120 ~ + 120 ) | ||
| J6 | 度 | 720 ( - 360 ~ + 360 ) | ||
| 最大速度 | J1 | 度/s | 300 | 225 |
| J2 | 度/s | 150 | 105 | |
| J3 | 度/s | 300 | 165 | |
| J4 | 度/s | 450 | 412 | |
| J5 | 度/s | 450 | ||
| J6 | 度/s | 720 | ||
| 最大合成速度 | mm/s | 4955*3 | 4200*3 | |
| 週期時間 | sec | 0.6秒範圍*4 | 0.7秒範圍*4 | |
| 位置重複精度 | mm | 土0.02 | ||
| 周圍溫度 | ºC | 0 ~ 40 | ||
| 主體質量 | Kg | 19 | 21 | |
| 容許力矩 | J4 | Nm | 4.17 | |
| J5 | Nm | 4.17 | ||
| J6 | Nm | 2.45 | ||
| 容許慣性 | J4 | kgm2 | 0.18 | |
| J5 | kgm2 | 0.18 | ||
| J6 | kgm2 | 0.04 | ||
| 工具配線 |
夾爪輸入4點 / 輸出4點 多功能夾爪專用信號線 |
|||
| 工具氣源配管 | φ4*4條 | |||
| 機器間電線 | 5m ( 兩端含有連接器 ) | |||
| 連接控制器 | CR800-D | |||
*1 : 在標準規格中,J1軸、J4軸及J6軸上無煞車。還備有全軸內置煞車規格。
*2 : 壁掛規格為限制J1軸動作範圍的特殊規格。
*3 : 全軸和成時的機械介面值。
*4 : 上下25mm、水平300mm來回動作、負荷1kg的值。
*5 : 最大負載能力為機械介面姿勢朝下 ( 最垂直±10º ) 限制下的可搭載質量
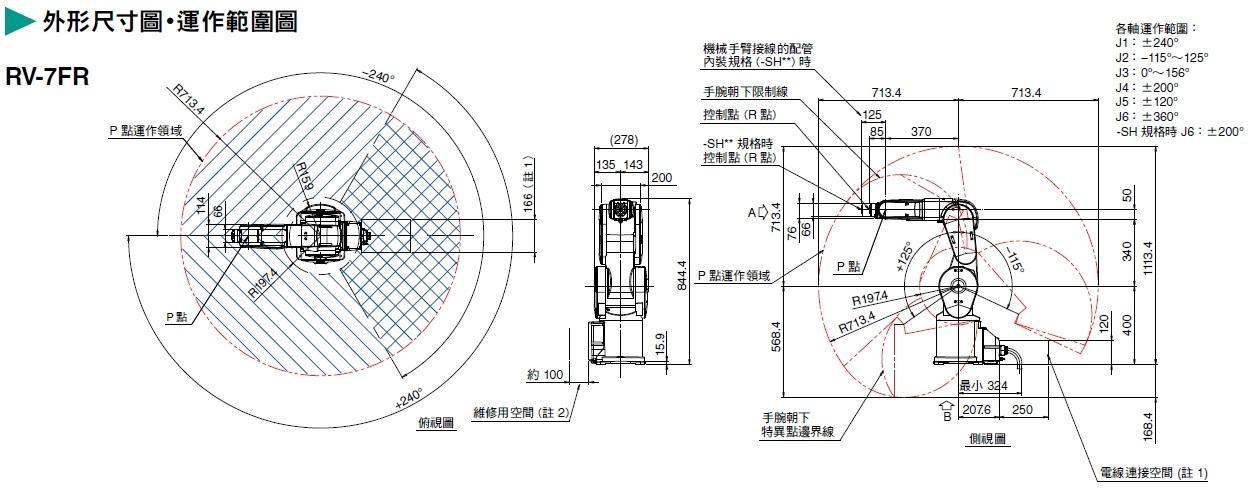
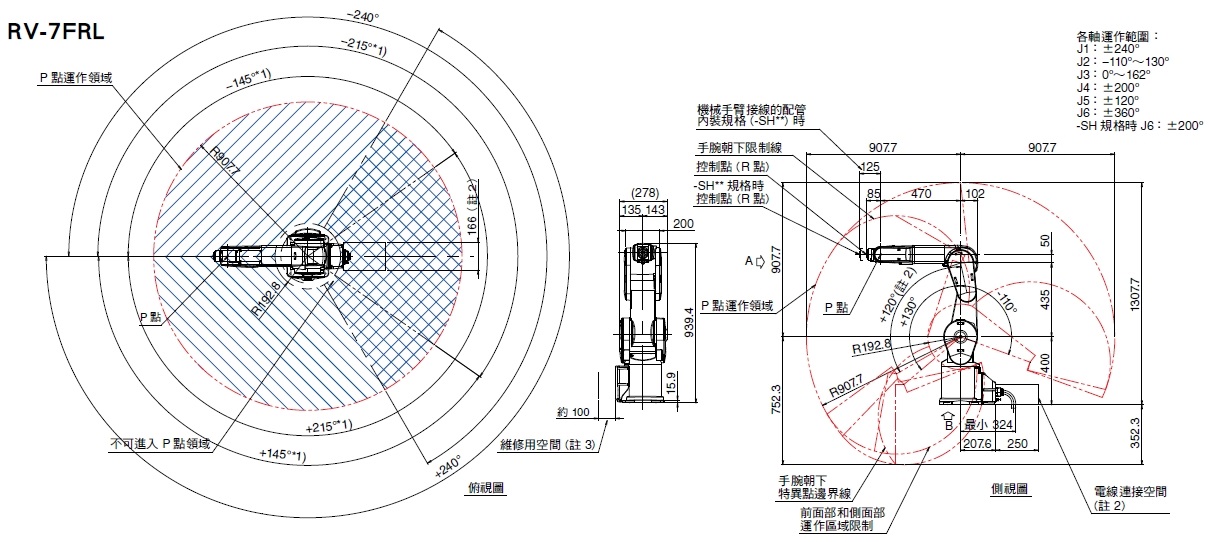
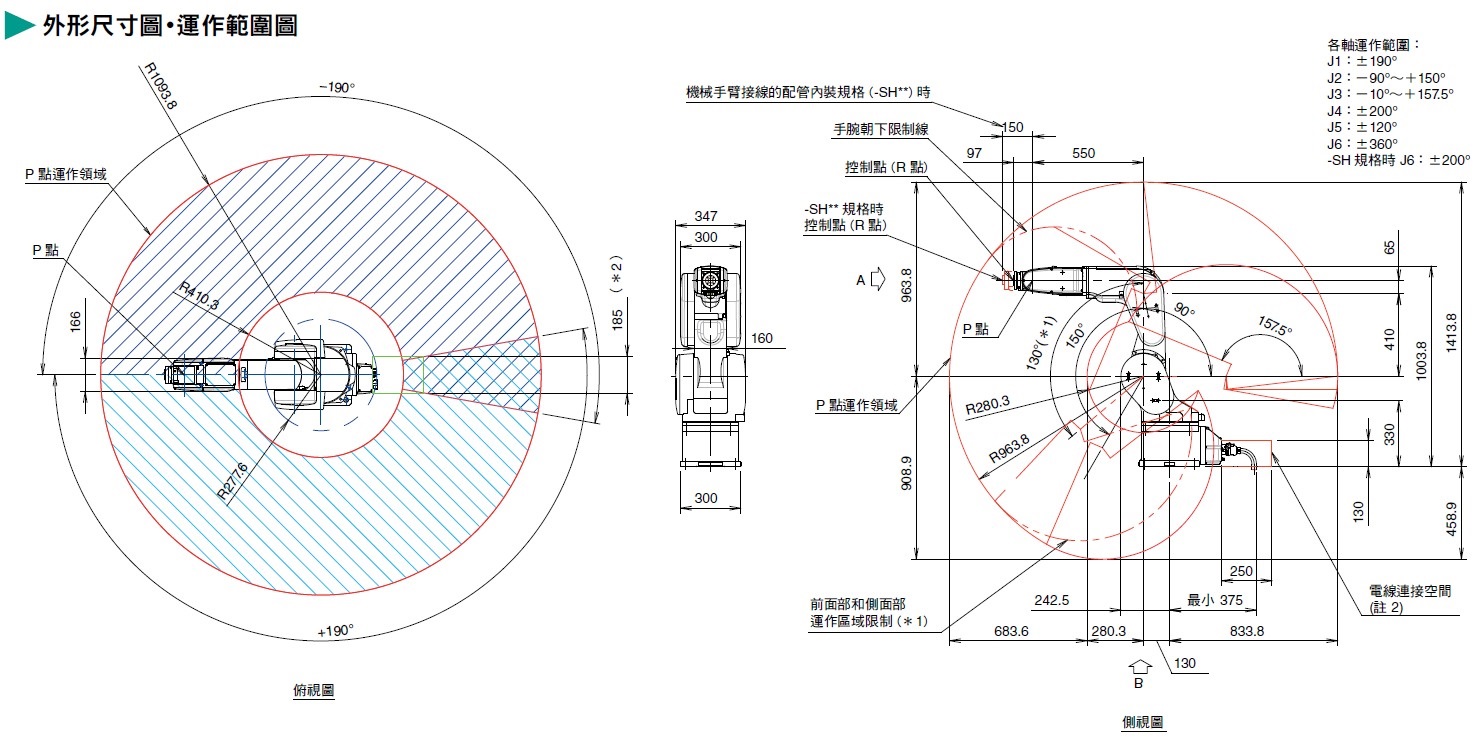
►外形尺寸圖•動作範圍圖
RV-2FR

• 最大合成速度 : 9.0m/s
• 回轉軸動作範圍 : ±240度
• 標準周期時間 : 0.36秒範圍
| 形號 | RV-4FR(M)(C) | RV-4FRL(M)(C) | |||
| 環境規格 | 標準 / 油霧 / 無塵 | ||||
| 保護等級 | IP40 ( 標準 ) / IP67 ( 油霧 )*1 / ISO等級3 ( 無塵 )*6 | ||||
| 安裝姿勢 | 落地、懸吊(壁掛*2) | ||||
| 構造 | 垂直多關節形 | ||||
| 動作自由度 | 6軸*8 | ||||
| 驅動方式 | AC伺服馬達 | ||||
| 位置檢出方式 | 絕對位置編碼器 | ||||
| 負載能力 | Kg | 最大4 ( 額定4 )*7 | |||
| 臂長 | mm | 235 + 275 | 310+335 | ||
| 最大有效範圍半徑 | mm | 515 | 649 | ||
| 動作範圍 | J1 | 度 | 480 ( - 240 ~ + 240 ) | ||
| J2 | 度 | 240 ( - 120 ~ + 120 ) | |||
| J3 | 度 | 161 ( 0 ~ + 161 ) | 164 ( 0 ~ + 164 ) | ||
| J4 | 度 | 400 ( - 200 ~ + 200 ) | |||
| J5 | 度 | 240 ( - 120 ~ + 120 ) | |||
| J6 | 度 | 720 ( - 360 ~ + 360 ) | |||
| 最大速度 | J1 | 度/s | 450 | 420 | |
| J2 | 度/s | 450 | 336 | ||
| J3 | 度/s | 300 | 250 | ||
| J4 | 度/s | 540 | |||
| J5 | 度/s | 623 | |||
| J6 | 度/s | 720 | |||
| 最大合成速度 | mm/s | 9027*3 | 9048*3 | ||
| 週期時間 | sec | 0.36秒範圍*4 | |||
| 位置重複精度 | mm | 土0.02 | |||
| 周圍溫度 | ºC | 0 ~ 40 | |||
| 主體質量 | Kg | 39 | 41 | ||
| 容許力矩 | J4 | Nm | 6.66 | ||
| J5 | Nm | 6.66 | |||
| J6 | Nm | 3.96 | |||
| 容許慣性 | J4 | kgm2 | 0.2 | ||
| J5 | kgm2 | 0.2 | |||
| J6 | kgm2 | 0.1 | |||
| 工具配線 |
夾爪輸入8點 / 輸出8點 多功能夾爪和感測器用信號線 LAN * 1 ( 100BASE - TX ) *5 |
||||
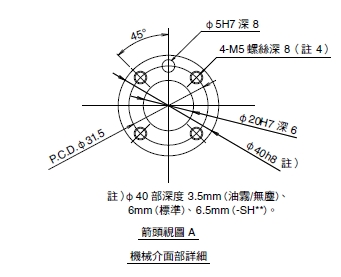
| 工具氣源配管 | 1次 : φ6*2條 2次 : φ4*8條、φ4*4條 (內置手腕時 ) | ||||
| 機器間電線 | 5m ( 兩端含有連接器 ) | ||||
| 連接控制器 | CR800-D | ||||
*1 : 有可能因顧客所使用的油質特性,而無法確保耐環境性能,請向營業人員確認。
*2 : 壁掛規格有限制J1軸動作範圍的特殊規格。
*3 : 全軸合成時的機械介面值。
*4 : 上下25mm、水平300mm來回動作,負荷1kg的值。
*5 : 也可作為備用線路 ( 0.13sq 4對絞線 ) 用。置於前臂部內。
*6 : 潔淨度的保護是以無塵室的垂直層流式 ( Down-flow ) 0.3m/s和機械手臂內部吸引為條件。
基座部後方備有吸引用φ8管接頭。
*7 : 最大負載能力為機械介面姿勢朝下 ( 對垂直±10º ) 限制下的可搭載質量。
*8 : 如需4軸規格長臂機時,請洽營業人員。
.jpg)
注記
1) 後面部、側面部動作區域限制 :
J1軸角度為 - 60º≦ J1 ≦ + 140º區域時,J1軸動作區域被限制為 - 113º ≦ J2 ≦ + 120º。
2) 請確保用於連接設備間電線的電線連接空間。
3) 起確保維護時,拆除保護蓋的維修空間。
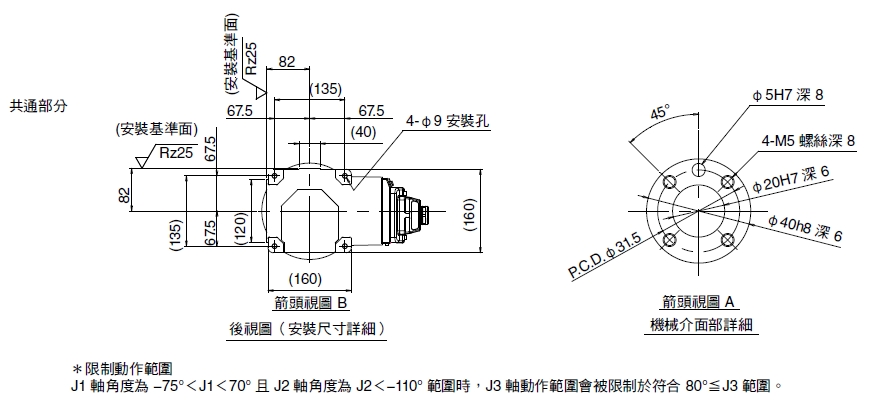
4) 螺絲部分請確保為 7.5 ~ 8 mm。
.jpg)
注記
1) 後面部、側面部動作區域限制 :
J1軸角度為 - 35º≦ J1 ≦ + 35º區域時,J1軸動作區域被限制為 - 114º ≦ J2 ≦ + 120º。
2) 請確保用於連接設備間電線的電線連接空間。
3) 起確保維護時,拆除保護蓋的維修空間。
4) 螺絲部分請確保為 7.5 ~ 8 mm。
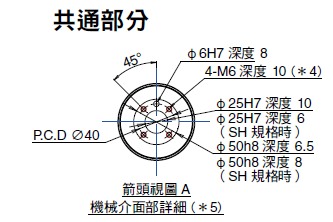
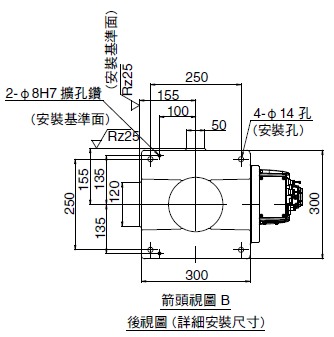
共通部分

• 最大合成速度 : 11.0m/s ( RV-7FR )
• 回轉軸動作範圍 : ±240度
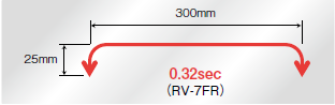
• 標準周期時間 : 0.32秒範圍
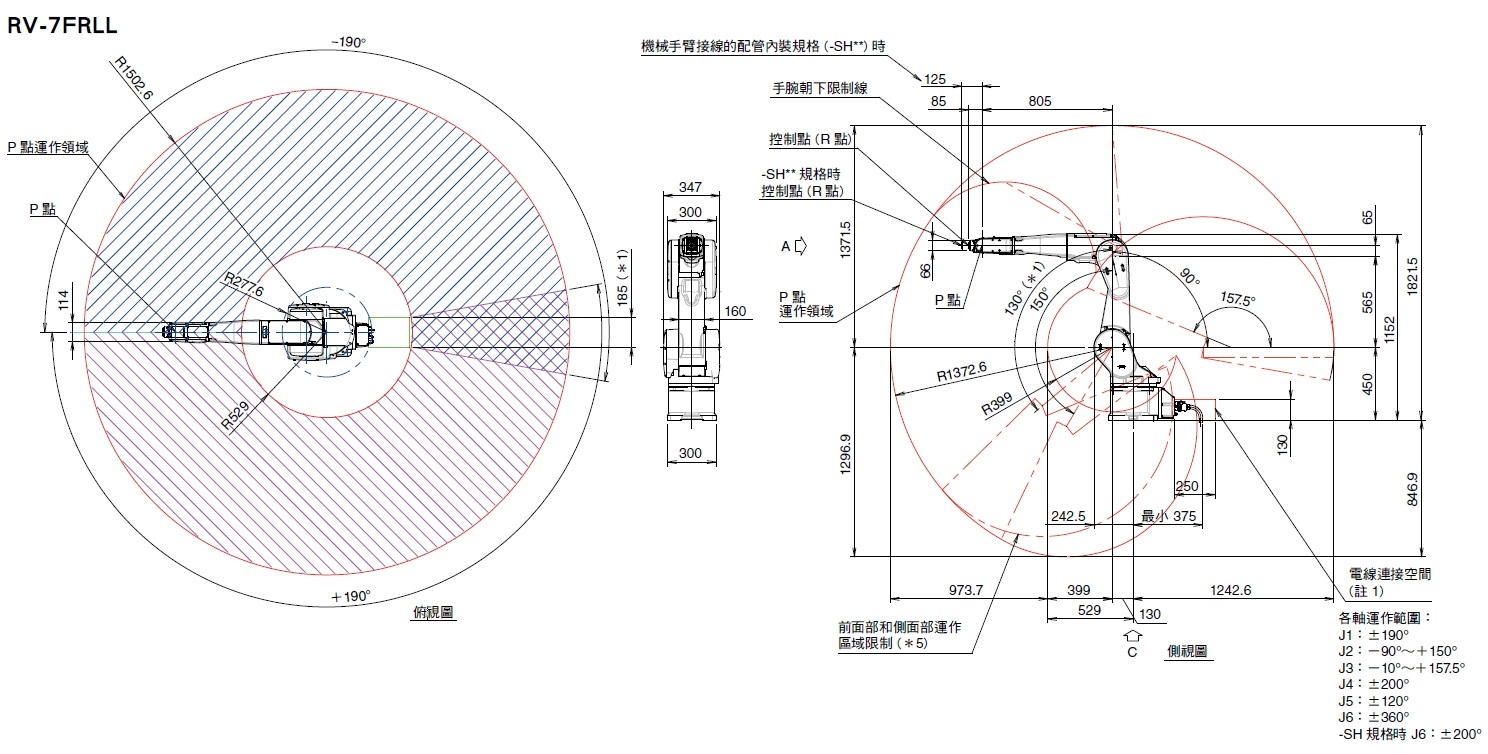
| 形號 | RV-7FR(M)(C) | RV-7FRL(M)(C) | RV-7FRLL(M)(C) | |||
| 環境規格 | 標準 / 油霧 / 無塵 | |||||
| 保護等級 | IP40 ( 標準 ) / IP67 ( 油霧 )*1 / ISO等級3 ( 無塵 )*6 | |||||
| 安裝姿勢 | 落地、懸吊(壁掛*2) | |||||
| 構造 | 垂直多關節形 | |||||
| 動作自由度 | 6軸*8 | |||||
| 驅動方式 | AC伺服馬達 | |||||
| 位置檢出方式 | 絕對位置編碼器 | |||||
| 負載能力 | Kg | 最大7 ( 額定7 )*7 | ||||
| 臂長 | mm | 340 + 370 | 436 + 470 | 565 + 805 | ||
| 最大有效範圍半徑 | mm | 713 | 908 | 1503 | ||
| 動作範圍 | J1 | 度 | 480 ( - 240 ~ + 240 ) | 380 ( - 190 ~ + 190 ) | ||
| J2 | 度 | 240 ( - 115 ~ + 125 ) | 240 ( - 110 ~ + 130 ) | 240 ( - 90 ~ + 150 ) | ||
| J3 | 度 | 156 ( 0 ~ + 156 ) | 162 ( 0 ~ + 162 ) | 167.5 ( - 10 ~ + 157.5 ) | ||
| J4 | 度 | 400 ( - 200 ~ + 200 ) | ||||
| J5 | 度 | 240 ( - 120 ~ + 120 ) | ||||
| J6 | 度 | 720 ( - 360 ~ + 360 ) | ||||
| 最大速度 | J1 | 度/s | 360 | 288 | 234 | |
| J2 | 度/s | 401 | 321 | 164 | ||
| J3 | 度/s | 450 | 360 | 219 | ||
| J4 | 度/s | 337 | 375 | |||
| J5 | 度/s | 450 | ||||
| J6 | 度/s | 720 | ||||
| 最大合成速度 | mm/s | 11064*3 | 10977*3 | 15300*3 | ||
| 週期時間 | sec | 0.32秒範圍*4 | 0.35秒範圍*4 | 0.63秒範圍*4 | ||
| 位置重複精度 | mm | 土0.02 | 土0.06 | |||
| 周圍溫度 | ºC | 0 ~ 40 | ||||
| 主體質量 | Kg | 65 | 67 | 130 | ||
| 容許力矩 | J4 | Nm | 16.2 | |||
| J5 | Nm | 16.2 | ||||
| J6 | Nm | 6.86 | ||||
| 容許慣性 | J4 | kgm2 | 0.45 | |||
| J5 | kgm2 | 0.45 | ||||
| J6 | kgm2 | 0.1 | ||||
| 工具配線 |
夾爪輸入8點 / 輸出8點 多功能夾爪和感測器用信號線 LAN * 1 ( 100BASE - TX ) *5 |
|||||
| 工具氣源配管 | 1次 : φ6*2條 2次 : φ4*8條、φ4*4條 (內置手腕時 ) | |||||
| 機器間電線 | 5m ( 兩端含有連接器 ) | |||||
| 連接控制器 | CR800-D | |||||
*1 : 有可能因顧客所使用的油質特性,而無法確保耐環境性能,請向營業人員確認。
*2 : 壁掛規格有限制J1軸動作範圍的特殊規格。
*3 : 全軸合成時的機械介面值。
*4 : 上下25mm、水平300mm來回動作,負荷1kg的值。
*5 : 也可作為備用線路 ( 0.13sq 4對絞線 ) 用。置於前臂部內。
*6 : 潔淨度的保護是以無塵室的垂直層流式 ( Down-flow ) 0.3m/s和機械手臂內部吸引為條件。
基座部後方備有吸引用φ8管接頭。
*7 : 最大負載能力為機械介面姿勢朝下 ( 對垂直±10º ) 限制下的可搭載質量。
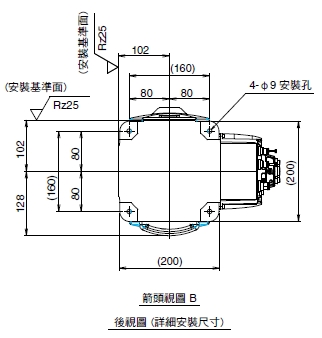
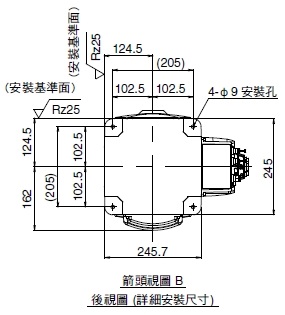
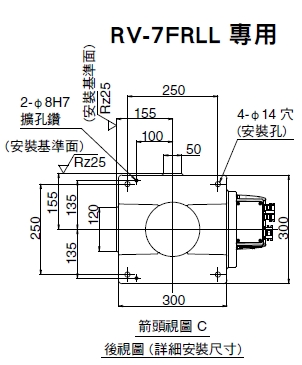
注記
1) 請確保用於連接設備間電線的電線連接空間。
2) 請確保維修時,拆除保護蓋的維修空間。
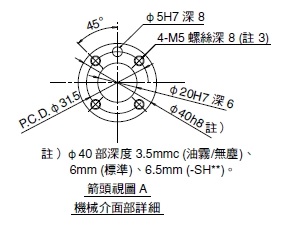
3) 螺絲部分請確保為7.5 ~ 8mm。
注記
1) 請確保用於連接設備間電線的電線連接空間。
2) 請確保維修時,拆除保護蓋的維修空間。
3) 螺絲部分請確保為7.5 ~ 8mm。
注記
1) 請確保用於連接設備間電線的電線連接空間。
2) 請確保維修時,拆除保護蓋的維修空間。
3) 螺絲部分請確保為7.5 ~ 8mm。
4) 前面部動作區域限制 : J1軸角度為 + 145º ≦ J1 ≦ + 215º 或 - 145º ≦ J1 ≦ -215º區域時,J2軸動作區域
被限制為 - 110º ≦ J2 ≦ + 120º。
5) 前面部動作區域限制 : J1軸角度為 J1 ≧ + 120º 或 J1 ≦ -120º 上的J2軸的運作區域被限制於 - 90º ≦ J2 ≦ + 130º。
6) -SH的詳細規格,請參照標準規格書。

• 最大合成速度 : 10.5 m/s ( RV-13FR)
• 回轉軸動作範圍 : ±190度
• 標準周期時間 : 0.53秒範圍

| 形號 | RV-13FR(M)(C) | RV-13FRL(M)(C) | |||
| 環境規格 | 標準 / 油霧 / 無塵 | ||||
| 保護等級 | IP40 ( 標準 ) / IP67 ( 油霧 )*1 / ISO等級3 ( 無塵 )*6 | ||||
| 安裝姿勢 | 落地、懸吊(壁掛*2) | ||||
| 構造 | 垂直多關節形 | ||||
| 動作自由度 | 6軸*8 | ||||
| 驅動方式 | AC伺服馬達 | ||||
| 位置檢出方式 | 絕對位置編碼器 | ||||
| 負載能力 | Kg | 最大13 ( 額定12 )*7 | |||
| 臂長 | mm | 410 + 550 | 565 + 690 | ||
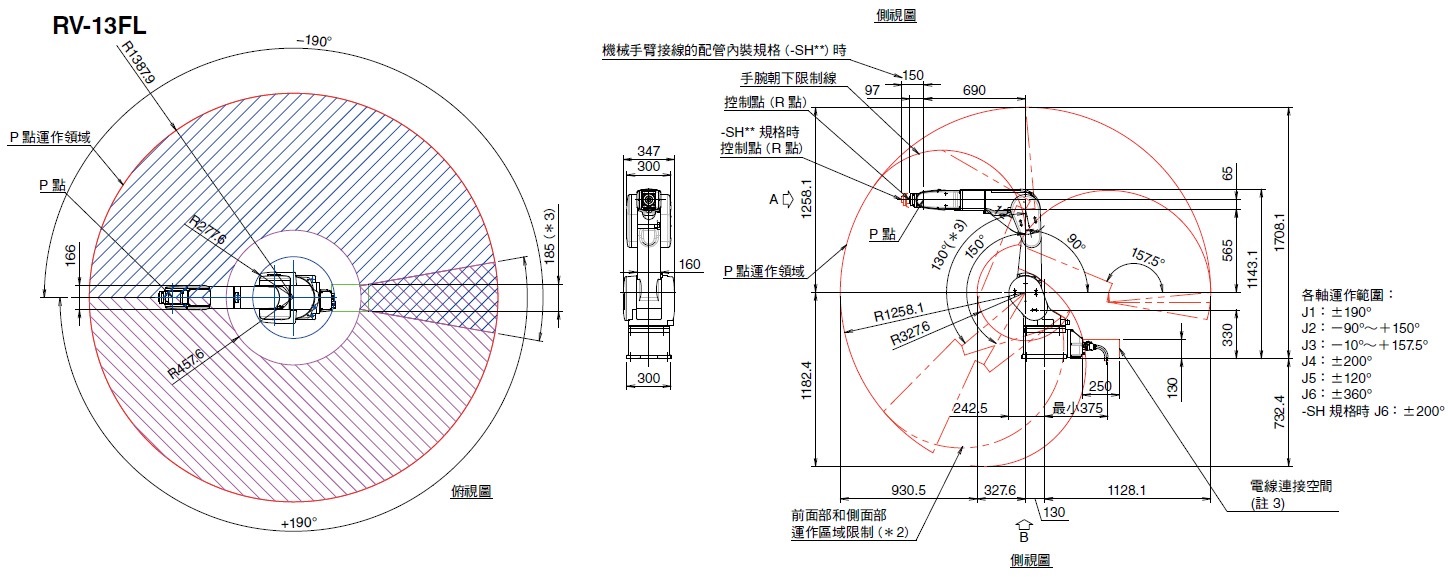
| 最大有效範圍半徑 | mm | 1094 | 1388 | ||
| 動作範圍 | J1 | 度 | 380 ( - 190 ~ + 190 ) | ||
| J2 | 度 | 240 ( - 90 ~ + 150 ) | |||
| J3 | 度 | 167.5 ( - 10 ~ + 157.5 ) | |||
| J4 | 度 | 400 ( - 200 ~ + 200 ) | |||
| J5 | 度 | 240 ( - 120 ~ + 120 ) | |||
| J6 | 度 | 720 ( - 360 ~ + 360 ) | |||
| 最大速度 | J1 | 度/s | 290 | 234 | |
| J2 | 度/s | 234 | 164 | ||
| J3 | 度/s | 312 | 219 | ||
| J4 | 度/s | 375 | |||
| J5 | 度/s | 375 | |||
| J6 | 度/s | 720 | |||
| 最大合成速度 | mm/s | 10450*3 | 9700*3 | ||
| 週期時間 | sec | 0.53秒範圍*4 | 0.68秒範圍*4 | ||
| 位置重複精度 | mm | 土0.05 | |||
| 周圍溫度 | ºC | 0 ~ 40 | |||
| 主體質量 | Kg | 120 | 130 | ||
| 容許力矩 | J4 | Nm | 19.3 | ||
| J5 | Nm | 19.3 | |||
| J6 | Nm | 11 | |||
| 容許慣性 | J4 | kgm2 | 0.47 | ||
| J5 | kgm2 | 0.47 | |||
| J6 | kgm2 | 0.14 | |||
| 工具配線 |
夾爪輸入8點 / 輸出8點 多功能夾爪和感測器用信號線 LAN * 1 ( 100BASE - TX ) *5 |
||||
| 工具氣源配管 | 1次 : φ6*2條 2次 : φ4*8條、φ4*4條 (內置手腕時 ) | ||||
| 機器間電線 | 5m ( 兩端含有連接器 ) | ||||
| 連接控制器 | CR800-D | ||||
*1 : 有可能因顧客所使用的油質特性,而無法確保耐環境性能,請向營業人員確認。
*2 : 壁掛規格有限制J1軸動作範圍的特殊規格。
*3 : 全軸合成時的機械介面值。
*4 : 上下25mm、水平300mm來回動作,負荷1kg的值。
*5 : 也可作為備用線路 ( 0.13sq 4對絞線 ) 用。置於前臂部內。
*6 : 潔淨度的保護是以無塵室的垂直層流式 ( Down-flow ) 0.3m/s和機械手臂內部吸引為條件。
基座部後方備有吸引用φ8管接頭。
*7 : 最大負載能力為機械介面姿勢朝下 ( 對垂直±10º ) 限制下的可搭載質量。
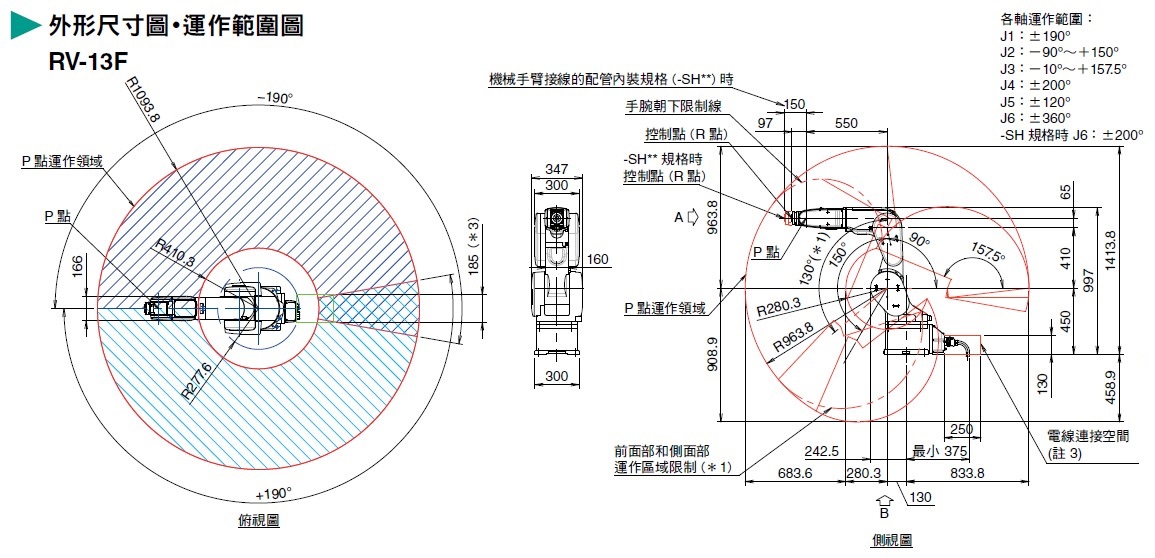
注記
1) 前面部和側面部運作區域 : 在J1軸角度為 J1 ≧ 120º 或 J1 ≦ -130º 中,J2軸的運作區域限制於 - 90º ≦ J2 ≦ + 130º。
2) 前面部運作區域限制 : 在J1軸角度為 J1 ≧ + 130º 或 J1 ≦ - 140º中,J2軸的運作區域被限制於 - 90º ≦ J2 ≦ + 130º。
3) 請確保用於連線設備間電線的電線連接空間。
4) 請確保螺絲部分為 10 ~ 9mm。
5) -SH的詳細規格,請參照標準規格書。
注記
1) 前面部和側面部運作區域 : 在J1軸角度為 J1 ≧ 120º 或 J1 ≦ -130º 中,J2軸的運作區域限制於 - 90º ≦ J2 ≦ + 130º。
2) 前面部運作區域限制 : 在J1軸角度為 J1 ≧ + 130º 或 J1 ≦ - 140º中,J2軸的運作區域被限制於 - 90º ≦ J2 ≦ + 130º。
3) 請確保用於連線設備間電線的電線連接空間。
4) 請確保螺絲部分為 10 ~ 9mm。
5) -SH的詳細規格,請參照標準規格書。

• 最大合成速度 : 9.0m/s
• 回轉軸動作範圍 : ±240度
• 標準周期時間 : 0.36秒範圍
| 形號 | RV-20FR(M)(C) | ||
| 環境規格 | 標準 / 油霧 / 無塵 | ||
| 保護等級 | IP40 ( 標準 ) / IP67 ( 油霧 )*1 / ISO等級3 ( 無塵 )*6 | ||
| 安裝姿勢 | 落地、懸吊(壁掛*2) | ||
| 構造 | 垂直多關節形 | ||
| 動作自由度 | 6軸*8 | ||
| 驅動方式 | AC伺服馬達 | ||
| 位置檢出方式 | 絕對位置編碼器 | ||
| 負載能力 | Kg | 最大20 ( 額定15 )*7 | |
| 臂長 | mm | 410 + 550 | |
| 最大有效範圍半徑 | mm | 1094 | |
| 動作範圍 | J1 | 度 | 930 ( - 190 ~ + 190 ) |
| J2 | 度 | 240 ( - 90 ~ + 150 ) | |
| J3 | 度 | 167.5 ( - 10 ~ + 157.5 ) | |
| J4 | 度 | 400 ( - 200 ~ + 200 ) | |
| J5 | 度 | 240 ( - 120 ~ + 120 ) | |
| J6 | 度 | 720 ( - 360 ~ + 360 ) | |
| 最大速度 | J1 | 度/s | 110 |
| J2 | 度/s | 110 | |
| J3 | 度/s | 110 | |
| J4 | 度/s | 124 | |
| J5 | 度/s | 125 | |
| J6 | 度/s | 360 | |
| 最大合成速度 | mm/s | 4200*3 | |
| 週期時間 | sec | 0.7秒範圍*4 | |
| 位置重複精度 | mm | 土0.05 | |
| 周圍溫度 | ºC | 0 ~ 40 | |
| 主體質量 | Kg | 120 | |
| 容許力矩 | J4 | Nm | 49.0 |
| J5 | Nm | 49.0 | |
| J6 | Nm | 11 | |
| 容許慣性 | J4 | kgm2 | 1.4 |
| J5 | kgm2 | 1.4 | |
| J6 | kgm2 | 0.14 | |
| 工具配線 |
夾爪輸入8點 / 輸出8點 多功能夾爪和感測器用信號線 LAN * 1 ( 100BASE - TX ) *5 |
||
| 工具氣源配管 | 1次 : φ6*2條 2次 : φ4*8條、φ4*4條 (內置手腕時 ) | ||
| 機器間電線 | 5m ( 兩端含有連接器 ) | ||
| 連接控制器 | CR800-D | ||
*1 : 有可能因顧客所使用的油質特性,而無法確保耐環境性能,請向營業人員確認。
*2 : 壁掛規格有限制J1軸動作範圍的特殊規格。
*3 : 全軸合成時的機械介面值。
*4 : 上下25mm、水平300mm來回動作,負荷1kg的值。
*5 : 也可作為備用線路 ( 0.13sq 4對絞線 ) 用。置於前臂部內。
*6 : 潔淨度的保護是以無塵室的垂直層流式 ( Down-flow ) 0.3m/s和機械手臂內部吸引為條件。
基座部後方備有吸引用φ8管接頭。
*7 : 最大負載能力為機械介面姿勢朝下 ( 對垂直±10º ) 限制下的可搭載質量。
注記
1) 前面部和側面部運作區域 : 在J1軸角度為 J1 ≧ + 120º 或 J1 ≦ - 130º 中,J2軸的運作區域被限制於 - 90º ≦ J2 ≦ + 130º。
2) 請確保用於連接設備間電纜的電線連接空間。
3) 請確保螺絲部分為 10 ~ 9mm。
4) -SH的詳細規格,請參照標準規格書。